日本精工(NSK)は、屋外環境での安定走行を可能にするサービスロボット向けプラットフォームの構成要素である「リンク式サスペンション」の技術検証を完了したと発表した。今後、教育機関や飲食店などでの実証実験を経て、2027年内に同プラットフォームの市場投入を目指す。
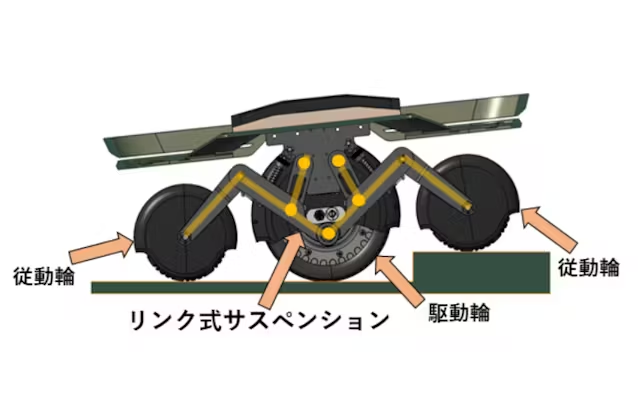
リンク式サスペンションは、パンタグラフ形状のリンク機構で駆動輪と従動輪を接続している装置だ。屋外での未整備の路面や段差やスロープ、点字ブロックなど路面の凹凸が多い環境でも駆動輪が確実に接地し、サービスロボットの安定した推進力と走行性能を確保できるという。23年に発表したプロトタイプをベースに、24年から立命館大学での屋外警備ロボットの実証実験を通じて改良を重ねた。
NSKが開発中のサービスロボット向けプラットフォームは、「屋外走行」「安定搬送」「自律走行」という3つの基本機能を低床ボディーにパッケージ化したものだ。車体の低床化は、サービスロボットの小型化にもつながるという。
本記事は編集プロセスの一部で生成AIの技術を活用しています。生成結果はそのまま利用せず、編集者・記者が確認・加筆・修正したうえで掲載しています。鄭重声明:本文の著作権は原作者に帰属します。記事の転載は情報の伝達のみを目的としており、投資の助言を構成するものではありません。もし侵害行為があれば、すぐにご連絡ください。修正または削除いたします。ありがとうございます。



